四条皮带运输机的传输系统PLC控制程序举例
发表时间:2018-09-08
有一个用四条皮带运输机的传输系统,分别用四台电动机M1~M4驱动,如图1所示。控制要求如下:
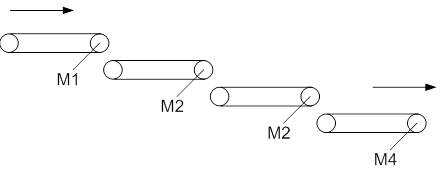
(1)起动时,先起动最后一条皮带,每延时2s后,依次起动其它皮带机,即M4→M3→M2→Ml。
(2)停止时,先停最前面一条皮带,每延时5s后,依次停止其它皮带机,即M1→M2→M3→M4。
(3)当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停下,而后面的皮带机按停止顺序依次停车。
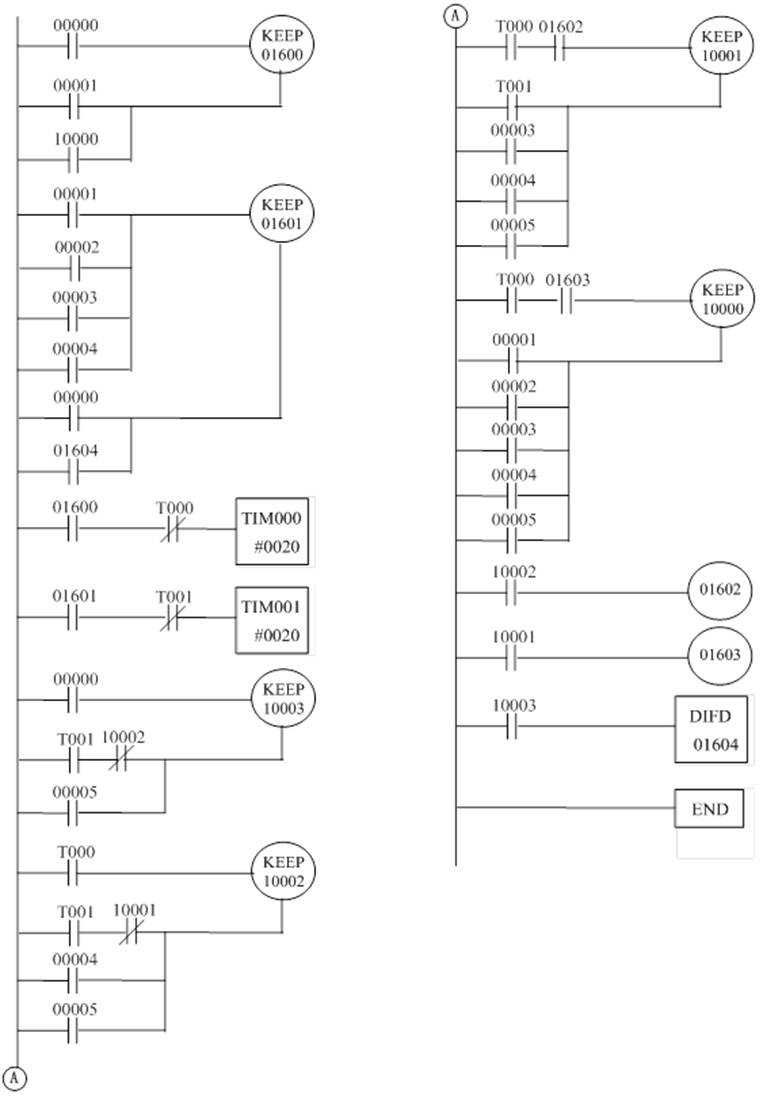
试设计满足上述控制要求的PLC控制程序。
解答:根据要求,每隔2s启动一条皮带,可由脉冲发生器来设定时间间隔。设00000为启动按钮,00001为停止按钮,00002、00003、00004、00005分别为四条皮带的故障停车信号;10000为第1条皮带驱动,10001为第2条皮带驱动,10002为第3条皮带驱动,10003为第4条皮带驱动。中间继电器01602和01603的作用是在启动过程中,连锁接点10002、10001的有效时间滞后1个扫描周期,以保证启动顺序;01604的作用是在4条传送带均停止后,复位停止继电器01601,使系统复原,如图2所示。
相关资讯13609158196







