用S7-200进行定位控制、监视和位置校正设计举
发表时间:2018-09-08
本例用S7-200 CPU 214 DC/DC/DC进行定位控制,并具有位置监视和位置校正
概述
本例相对位置山增量传感器进行位置监视。为了求出传感器信号,将该信号作为CPU 214中的最大可处理7kHz信号的高速计数器的输入,这样,就可检测出位置误差。例如,当起一停频率超出时,通过步数丢失可以检测到位置错误。一旦检测出位置误差,就以较低频率进行位置校正。

硬件要求
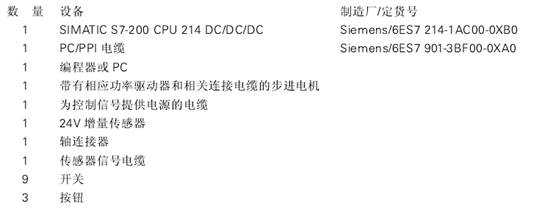
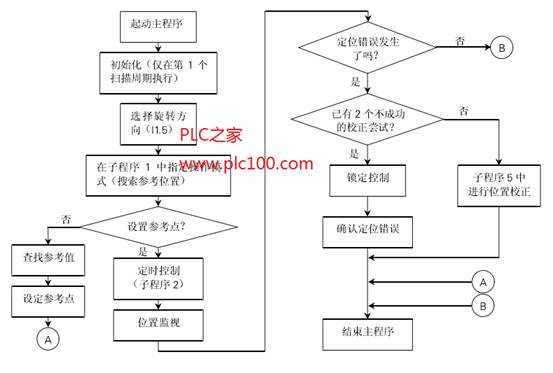
程序框图
程序和注解
一、初始化
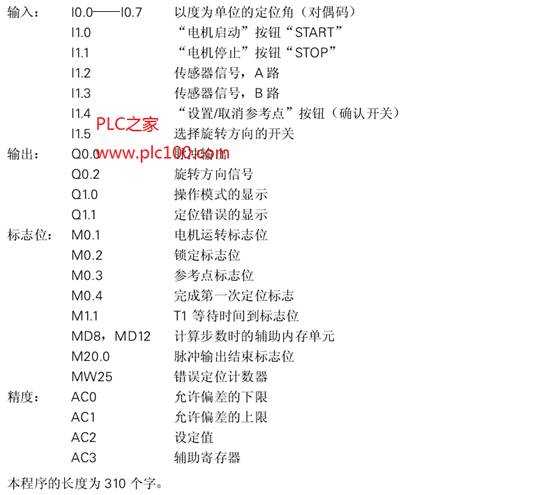
在程序的第一个扫描周期((SM0.1=1)设置重要的参数。此外,高速计数器HSC2由外部复位并初始化为A/B计数器。HSC2对检测定位的增量轴编码器信号计数。传感器的A路和B路信号分别作为CPU输入端I1.2和I1.3的输入。旋转方向的选择、按钮锁定、操作模式的选择及定位的过程 (请参考此例概述)。由增量传感器进行定位监视,在输出脉冲结束之后,等待T1时间,以便使连接电机和传感器的轴连接器的扭转振动消失。
二、实际值和设定值的比较
T1到时后,子程序4对实际值和设定值进行比较。如果轴的位置在设定位置的±2步范围内,定位就是正确的。如果实际位置在此目标范围之外,当超过起停频率时,那就会造成电机失步这种情况的发生,此时,一个相应的警告信号就会则Q1.1输出。
三、位置的较正
若定位错误被检测出来,则起动第二等待定时器T2。此后,根据设定值和实际值之间的差值计算出校正的步数。当校正时,电动机频率低于起停频率,以防新的步数丢失。
四、校正取消
如果在两次校正尝试之后还小能达到设定位置,为女全起见,控制将被锁定(M0.2=1 )。只有按下确认按钮I1.4之后,控制才被打开,然后,进行另一个参考点的检测。
五、信号清单:
相关资讯13609158196







