- 艾宝物联IOBOV® ─ 工业无线测控专家
试用PLC设计按行程原则实现机械手的夹紧-正转-放松-反转-回原位的控制。
答:机械手动作顺序表、现场器件与PLC内部继电器对照表、PLC与现场器件接线图以及梯形图如下图所示。
机械手动作顺序表
|
步序 |
输入条件 |
输出状态 |
|||
|
1YA 夹紧 |
2YA 正转 |
3YA 反转 |
HL 灯 |
||
|
原点 夹紧 正转 放松 反转 原点 |
1ST 1SB KT1 2ST KT2 1ST |
- + + - - - |
- - + - - - |
- - - - + - |
+ - - - - + |
现场器件与PLC内部继电器对照表
|
现场器件 |
内部继电器地址 |
说明 |
|
|
输入 |
1SB 1ST 2ST 2SB |
400 401 402 403 |
启动按钮 原点行程开关 正转行程开关 复位按钮 |
|
输出 |
1YA 2YA 3YA HL |
430 431 432 433 |
夹紧电磁阀 正转电磁阀 反转电磁阀 原位指示灯 |
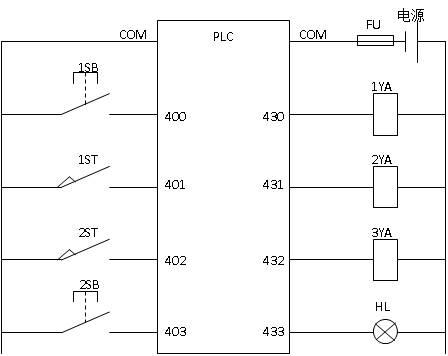
PLC与现场器件接线图:
梯形图为:
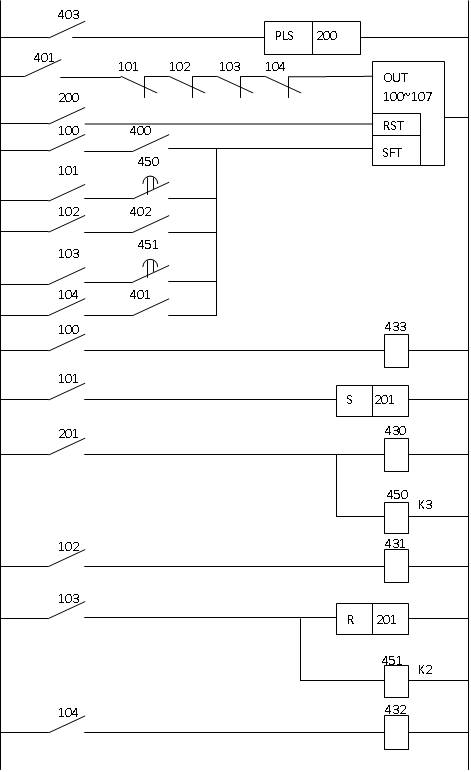
指令程序为:
LD 403
PLS 200
LD 401
ANI 101
ANI 102
ANI 103
ANI 104
OUT 100
LD 200
RST 100
LD 100
AND 400
SFT 100
LD 101
AND 450
SFT 100
LD 102
AND 402
SFT 100
LD 103
AND 451
SFT 100
LD 104
AND 401
SFT 100
LD 100
OUT 433
LD 101
S 201
LD 201
OUT 430
OUT 450
K 3
LD 102
OUT 431
LD 103
R 201
OUT 451
K 2
LD 104
OUT 432
END