- 艾宝物联IOBOV® ─ 工业无线测控专家
西门子CPU 214有两个脉冲输出,可以用来产生控制步进电机驭动器的脉冲。功率驭动器将控制脉冲按照某种模式转换成步进电机线圈的电流,产生旋转磁场,使得转子只能按固定的步数(步角a)来改变它的位置。连续的脉冲序列产生与其对应的同频率(同步机)步序列。如果控制频率足够高,步进电机的转动可看作一个连续的转动。
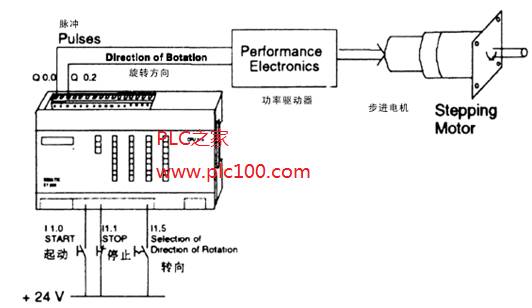
本例叙述用Q0.0的输出脉冲触发步进电机驭动器。当输入端I1.0发出“START”(起动)信号后,控制器将输出固定数目的方波脉冲,使步进电机按对应的步数转动。当输入端I1.1发出“STOP"(停止)信号后,步进电机停比转动。接在输入端I1.5的方向开关位置决定电机正转或反转。
例图
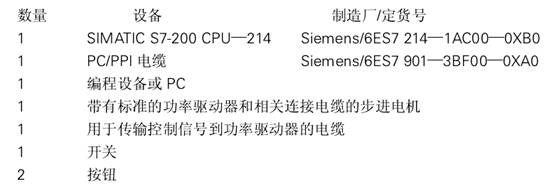
硬件要求
程序框图
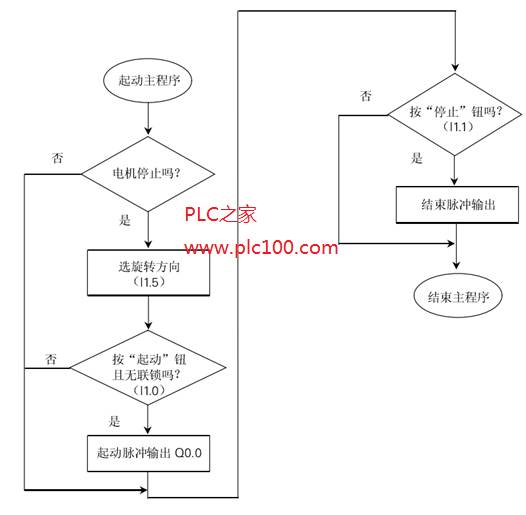
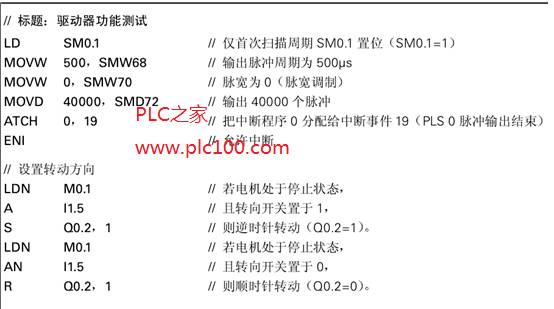
程序和注释
一、初始化
在程序的第一个扫描周期(SM0.1=1),为两种脉冲输出功能(PTO和PTW)选择参数,本例从中选择了PTO,并规定了脉冲周期和脉冲数。
二、选择转动方向
用接在输入端I1.5的开关来选择转动方向。如果I1.5=1,将输出Q0.2置成高电位,那么电机逆时针转动。如果I1.5=0,将输出Q0.2置成低电位,那么电机顺时针转动。为保护电机避免漏步,电机转动方向的改变只能在电机处于停比状态(M0.1=0)时进行。
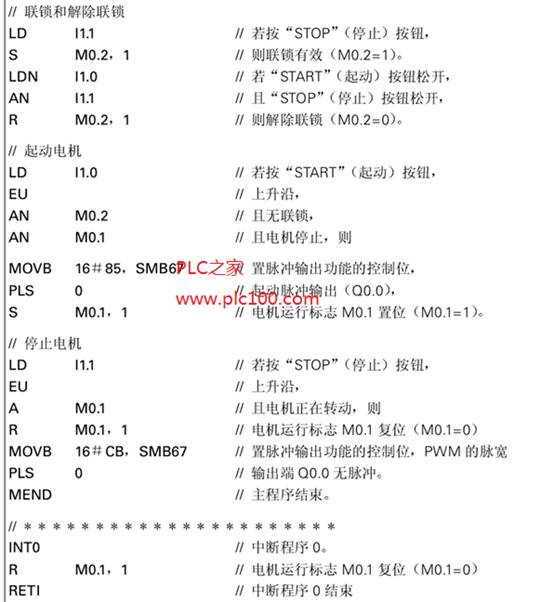
三、起动电机
起动电机的3个条件如下:
1.按“START”(起动)按钮,在输入端I1.0产生脉冲上升沿(从0升到1 );
2.无联锁,即联锁标志M0.2=0;
3.电机处于停比状态,即操作标志M0.1=0。
如果同时具备上述3个条件,则将M 0.1置位(M0.1=1,控制器执行PLS0指令,在输出端Q0.0输出脉冲,其它必须预先具备的条件,己经在首次扫描(SM0.1=1)设置,主要是脉冲输出功能的基本数据。例如,时基、周期和脉冲数。这些数据置于相应的属于PTO/PWM的特殊存储字SMW68,SMW70和SMD72。
四、停止电位
停止电机的2个条件如下:
1.按“STOP"(停止)按钮,在输入端I1.1产生脉冲上升沿(从0升到1);
2.电机处于转状态,即操作标志M 0.1=1。
如果同时具备上述2个条件,则将标志M0.1复位(M0.1=0),并中断输出端Q0.0的脉冲输出。这与执行PLSO指令有关,它将脉宽调制(PWM)输出的脉冲宽度减为0(所需的基本设置己在第一个扫描周期中定义了),因而输出信号被抑制。
在完整的脉冲序列输出后,中断程序0将标志M0.1复位(M0.1=0),从而使电机能够重新起动。为更清晰起见,这部分程序小包括在本例程序流程图中。
五、联锁
为保护人员和设备的女全,在按“STOP"(停n)按钮(I1.1之后,必须规定驭动器联锁(或称阻塞),将联锁标志M0.2置位(M0.2=1),立即关断驭动器。只有在M0.2复位(M0.2=0)后,才能重新起动电机。当“STOP”按钮松开后,为防比电机的意外起动,只有在“START”按钮(I1.0)和“STOP”按钮I1.1都松开后,才能将M0.2复位(M0.2=0)如要再次起动电机,则必须再发出一个起动信号。
六、程序清单